 jp
jp
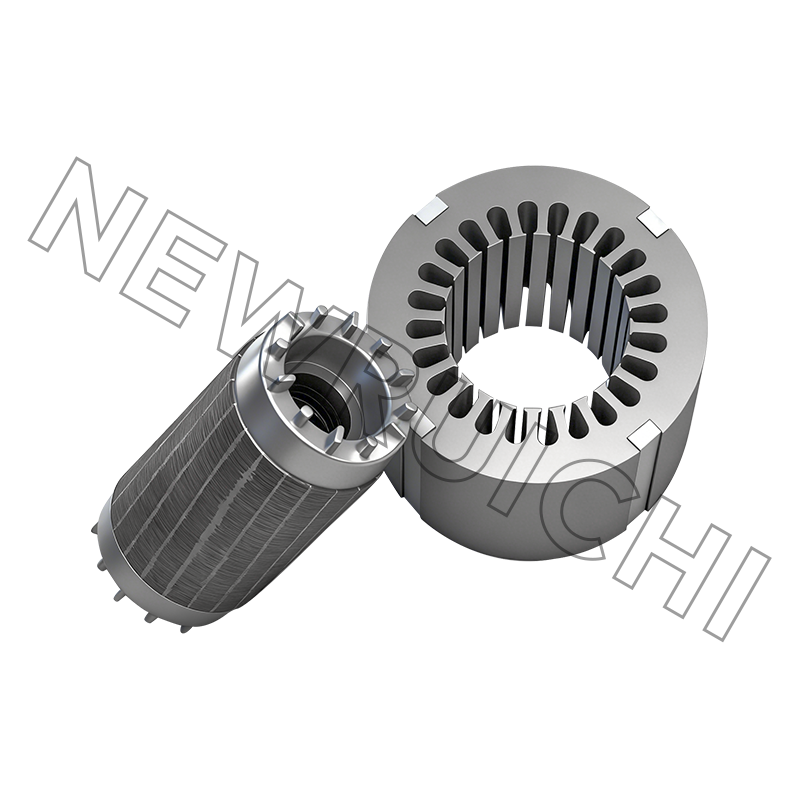
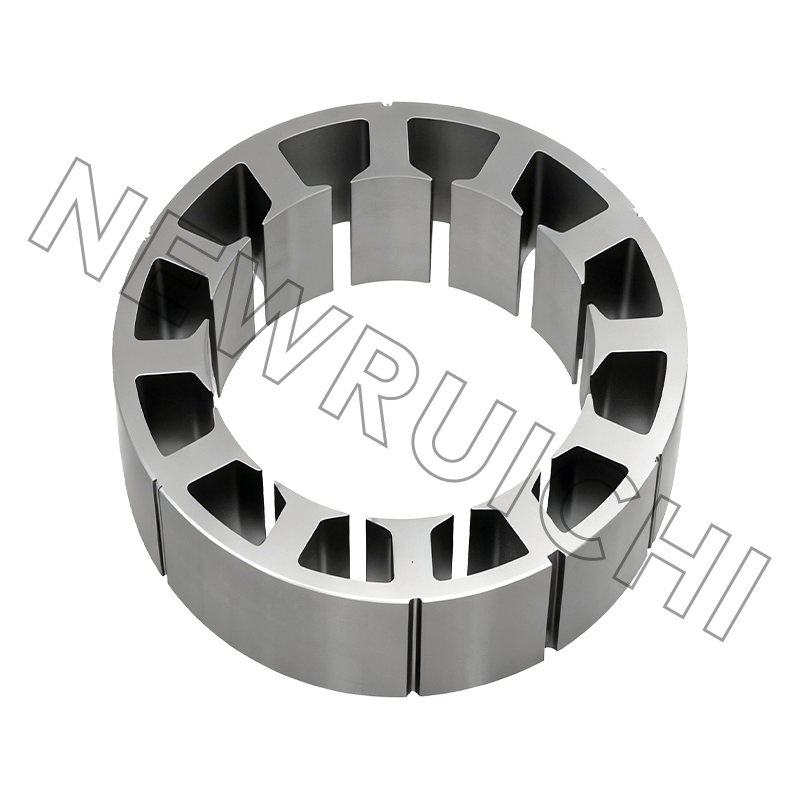
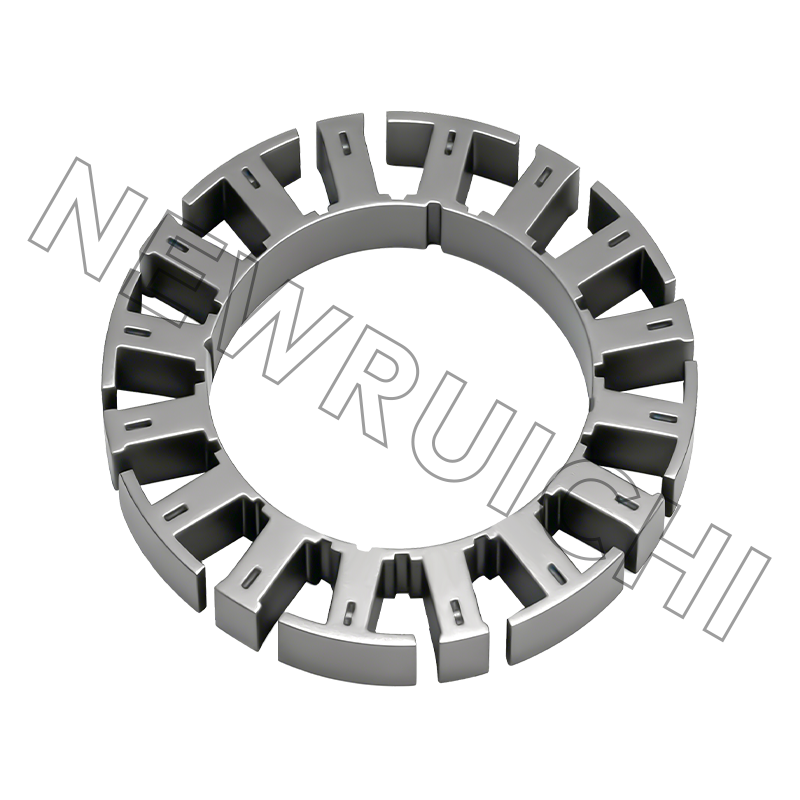
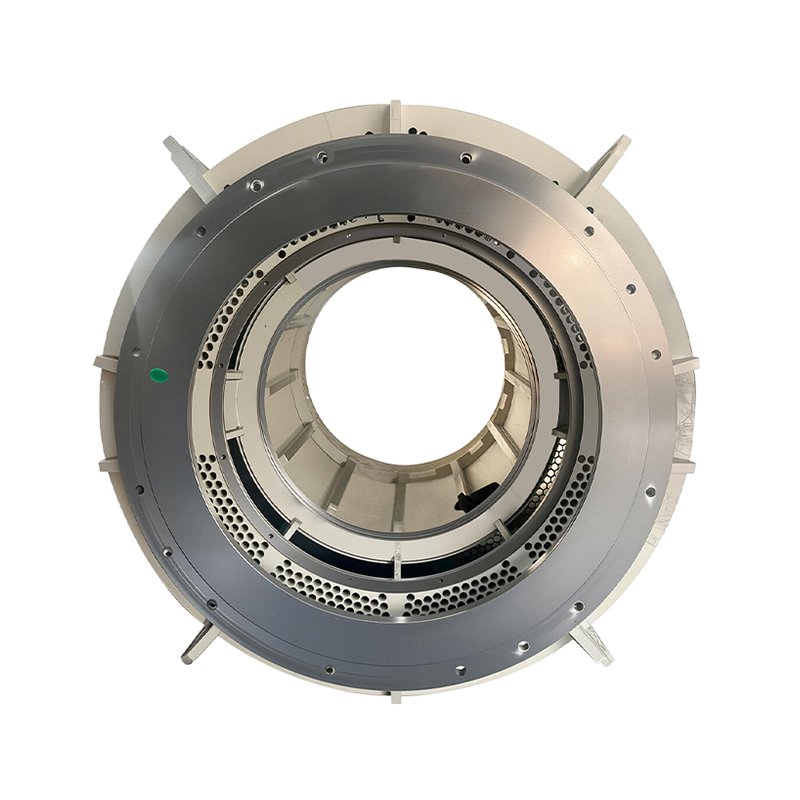
サーボモーターのステーターコアとローターの積層
モーターのステーターコアがサーボシステムの性能を決める理由
精密モーション システムでは、サーボ モーターが作動ジョイントとして機能し、ミリ秒レベルの応答性で電気入力を制御された機械出力に変換します。その変換プロセスの中心となるのはモーターのステーター コアです。これは、ローターを駆動する回転電磁場を生成する固定磁気構造です。その形状、材料特性、製造精度が総合的に、エネルギー変換がどの程度効率的かつ正確に行われるかを決定します。
適切に設計されたステーター コアは、磁束を伝導するだけではありません。これは、エアギャップ全体にわたる磁束の空間分布を形成し、トルクの直線性、逆起電力波形の品質、およびさまざまな負荷条件にわたって正確な位置制御を維持するモーターの能力に直接影響します。ロボット アーム、CNC マシニング センター、およびハイサイクル自動組立ライン (位置精度がマイクロメートル単位、サイクル タイムがミリ秒単位で測定される環境) では、ステーター コアは汎用部品ではありません。精密な性能要素です。
ステータ コアの選択と仕様を調達ではなく技術的な決定として扱うメーカーは、トルク リップルの低減、熱蓄積の低減、メンテナンス サイクル間の動作間隔の延長など、システム レベルでのより良い結果を一貫して達成しています。
材料の選択: 低損失磁気性能の基礎
ラミネート材料の磁気的および電気的特性は、モーターの効率と動的応答の絶対的な上限を設定します。サーボ モーターのステーターとローターの積層には、高透磁率シリコン鋼 (通常はシリコン含有量が 2% ~ 3.5% の無方向性電磁鋼板) が、精密サーボ アプリケーションで選ばれる材料です。
シリコン合金化により電気抵抗率が増加することで渦電流損失が抑制され、高透磁率グレードにより磁気回路がより高い磁束密度で飽和することが保証され、コア体積あたりのトルク出力が向上します。ラミネート材料を調達する際に指定する重要な性能パラメータは次のとおりです。
- 鉄損(W/kg) — 特定の磁束密度および周波数で測定(例:50 Hz で 1.0 T、高速アプリケーションの場合は 400 Hz)。コア損失の低減により熱生成が低減され、動作速度での効率が向上します。
- 比透磁率(μr) — 透磁率が高くなると、所定の磁束密度を達成するために必要な起磁力が減少し、より応答性の高いトルクの生成が可能になります。
- 積層厚さ — より薄い積層体 (0.20 mm、0.27 mm、0.35 mm) により、より高い電気周波数での渦電流損失が減少します。適切な厚さはモーターの定格速度と制御帯域幅によって異なります。
- 絶縁被覆 — 層間絶縁(通常は C-5 または C-6 グレードのコーティング)により、積層された積層間に渦電流がブリッジするのを防ぎ、組み立てられたコアの意図した損失特性を維持します。
10,000 RPM を超えて動作する超高速サーボ モーターの場合、従来のケイ素鋼の代わりにアモルファス金属合金またはコバルト鉄グレードが指定される場合があり、対応するコスト プレミアムで高周波でのコア損失が大幅に低くなります。
精密スタンピング: 製造プロセスが寸法の一貫性をどのように促進するか
生の電磁鋼板から完成品への移行 サーボモーターのステーターとローターの積層 は、大量生産全体にわたって厳しい幾何公差を維持できる精密なスタンピング技術を必要とします。積層の寸法の不一致、つまりスロットの形状、歯の幅、または外径の変動は、組み立てられたコアの磁気の非対称性に直接変換され、エアギャップの磁束に高調波歪みが生じ、トルク リップルが測定可能なほど増加します。
順送金型スタンピングはサーボモーター積層の主要な製造方法であり、大規模な一貫した品質に必要なスループットと再現性を提供します。スタンピング中に制御される主な寸法パラメータには次のものがあります。
- スロット幾何公差 - スロットの幅と深さは、巻線の充填率と磁路の磁気抵抗に直接影響します。サーボグレードのラミネートの一般的な許容誤差目標は ±0.02 mm 以上です
- バリ高さ制御 - スタンピングせん断ゾーンからの過剰なバリは、有効積層厚さを増加させ、絶縁の完全性を損ない、ヒステリシス損失を高める応力集中を引き起こします。バリの高さは通常、≤0.05 mm に制御されます。
- フラットネスとキャンバー — 平坦でない積層により積層の不均一性が生じ、動作速度でローターの偏心や振動が発生します。平坦度偏差は通常、積層直径 100 mm あたり 0.1 mm 以内に指定されます。
- 内外径の同心度 — ローター外周の均一なエアギャップを維持するために重要であり、エアギャップ磁束密度波形の空間高調波成分を直接制御します。
制御されたダイのクリアランスと定期的なダイのメンテナンスによって実現される滑らかなエッジは、高速回転時の機械的バランスにも貢献し、可聴ノイズやベアリング摩耗の加速につながる振動加振力を低減します。
ステーター ローター コアの設計: 極とスロットのマッチングと磁気回路の最適化
の ステーターローターコア 構成 (ステータのスロット数、ロータの極数、およびそれらの幾何学的関係の組み合わせ) は、サーボ モータのトルク リップルの大きさ、コギング トルク、巻線インダクタンスを制御する主要な設計変数です。この組み合わせを正しく行うには、単に高い極数や大きなスロット番号を選択するだけの問題ではありません。そのためには、ステーターの MMF 分布とローターの磁束パターンの間の高調波相互作用を体系的に評価する必要があります。
サーボ モーターの設計で使用される一般的な極とスロットの組み合わせとその性能特性を以下にまとめます。
| ポール/スロットの組み合わせ | コギングトルク | 巻線係数 | 代表的な用途 |
|---|---|---|---|
| 8P/12S | 低い | 0.866 | 汎用サーボ、ロボティクス |
| 10P/12S | 非常に低い | 0.933 | 高精度位置決め、ダイレクトドライブ |
| 6P/9S | 中 | 0.866 | 小型サーボ、医療機器 |
| 14P/12S | 非常に低い | 0.933 | 低い-speed high-torque, collaborative robots |
極とスロットの選択に加えて、ステーター スロットのスキュー、ローター マグネットのスキュー、歯先の面取りなど、ステーター ローター コアの形状における補助的な設計機能が、コギング トルク高調波をさらに減衰するために適用されます。これらの幾何学的改良は積層スタンピング段階で実装され、その正確な実行は前のセクションで説明したのと同じ寸法精度に依存します。
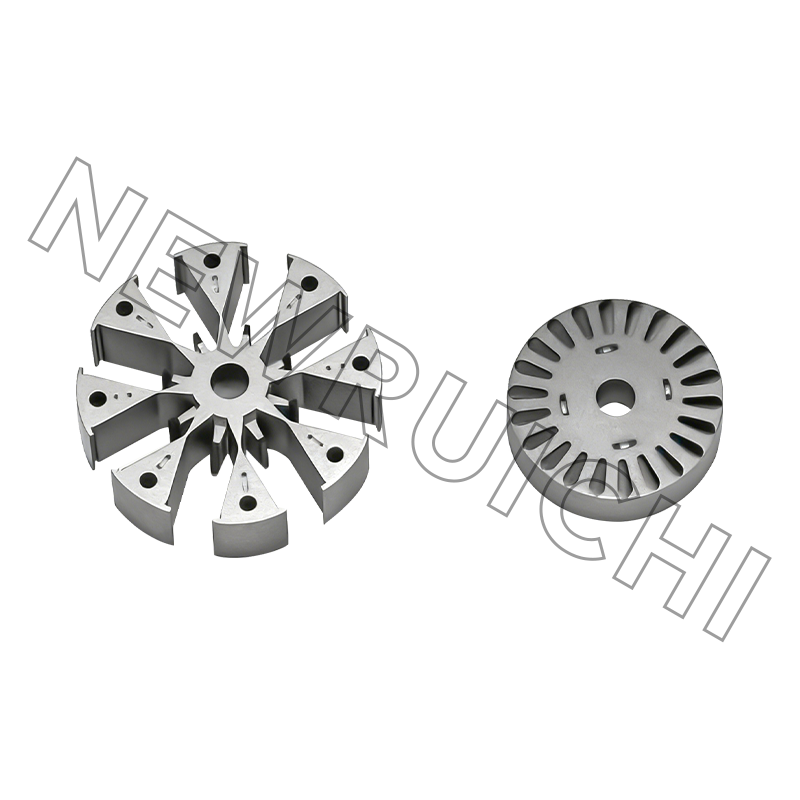
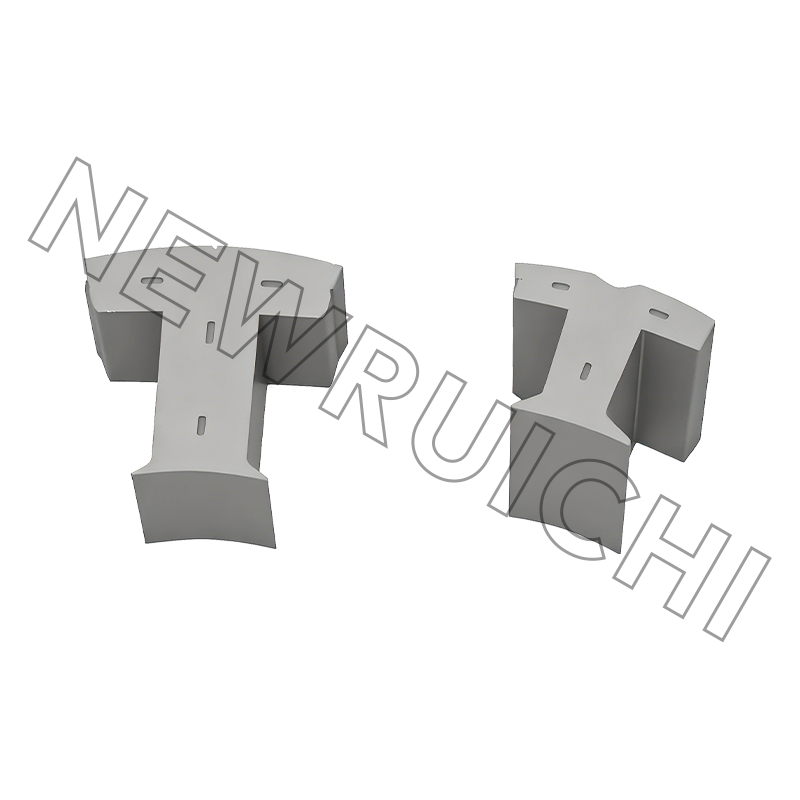
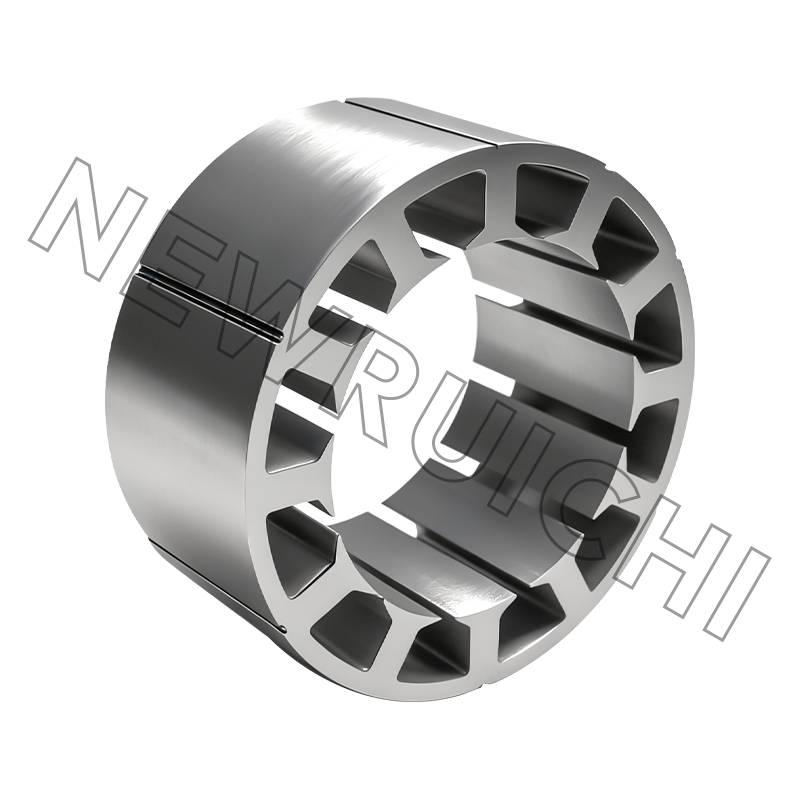
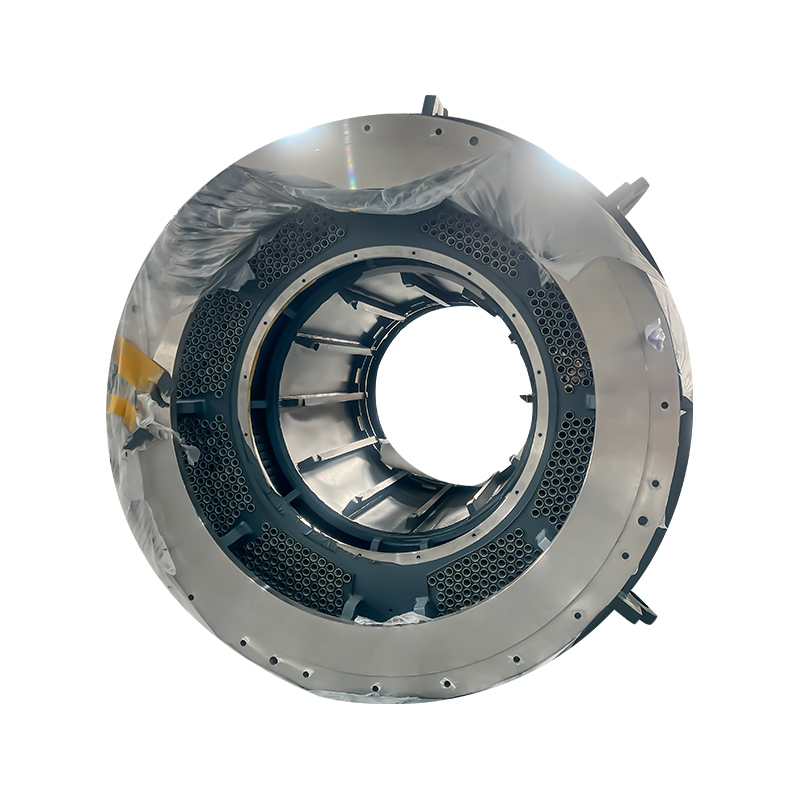
積層、接着、コアの組み立て: 積層から機能コアまで
個々のサーボ モータのステータとロータの積層は、一貫した層間接触と正確な軸位置合わせを備えた一貫した積層コアに組み立てられた場合にのみ、その完全な機能的価値を獲得します。選択した組み立て方法は、機械的完全性、磁気性能、および巻線の挿入やローターのバランスを含む下流の製造プロセスへの適合性に影響します。
の primary stacking and bonding methods used for servo-grade cores are:
- インターロッキング(セルフクリンチ) - スタンプされたディンプルまたはタブが積み重ね中に隣接する積層体を連結し、接着剤や留め具を使用せずに機械的結合を提供します。スピードとコスト効率の点で大量生産に最も一般的な方法
- レーザー溶接 - 積層コアの外径に沿って適用される軸方向溶接ビード。良好な寸法安定性を備えた剛性アセンブリを生成しますが、溶接による応力により、影響を受けるゾーンの局所的な鉄損がわずかに増加する可能性があります。
- 接着剤による接合(接着されたラミネートスタック) — 嫌気性接着剤またはエポキシ接着剤を積層表面の間に塗布します。溶接やかみ合わせによる機械的ストレスを排除し、各積層の完全な磁気特性を維持します。超低ノイズかつ高精度のサーボコアに最適
- 通しボルトAss'y — 積層体は精密マンドレル上に整列され、通しボルトで固定されます。主に、インターロックや溶接が現実的でない、より大きなフレーム サイズに使用されます。
永久磁石サーボ モーターのローター コアの場合、正確な軸方向の積層位置合わせが特に重要です。ローターの積層スタックと磁石の取り付け形状の間の位置ずれにより、非対称の磁束経路が生じ、動作中のコギング トルクと音響ノイズの両方が増加します。
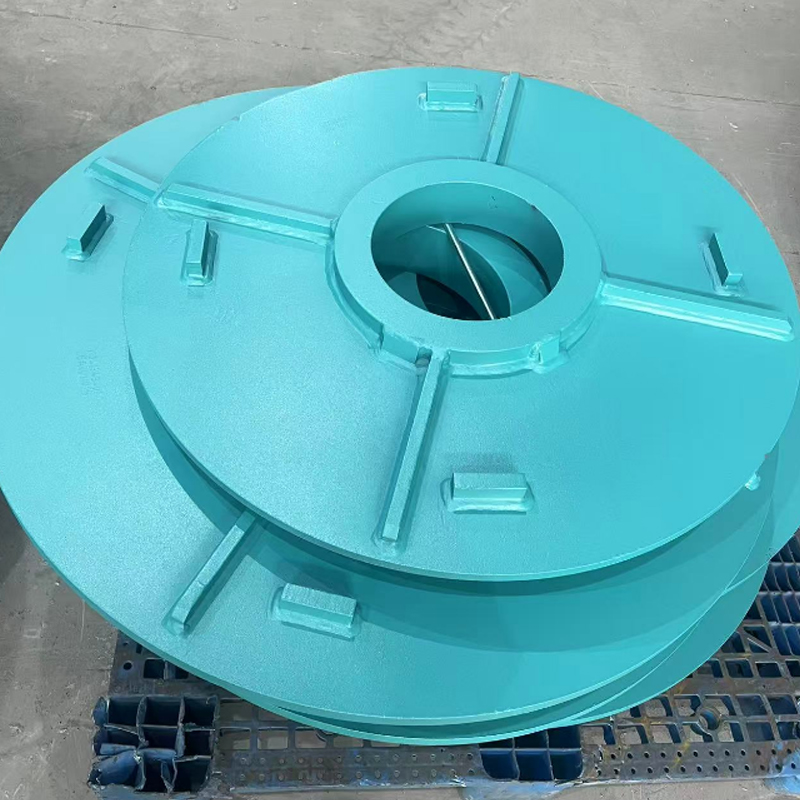
サーボモーター積層ジオメトリのカスタマイズ オプション
標準の積層ジオメトリは、最も一般的なサーボ モーターのフレーム サイズとポールとスロットの構成をカバーしていますが、多くの高精度モーション アプリケーションでは、特定の性能、パッケージング、または統合要件を満たすためにカスタマイズされた積層設計が必要です。積層ジオメトリのカスタマイズは、次の寸法にわたって利用できます。
- 外径と内径 — 特定のモーターフレーム寸法またはダイレクトドライブ統合の制約に合わせて調整
- 溝の形状と開口幅 — 特定の巻線ゲージ、フィルファクター、スロット漏れインダクタンスの目標に合わせて最適化
- 歯先形状 — 歯先領域の磁束密度に対するコギングトルクの低減のバランスをとるために、面取り角度と先端幅を調整
- ローターマグネットポケットの形状 — 内部永久磁石 (IPM) ローター設計の場合、ポケットの形状によってフラックスバリアの有効性と突極性比が決まり、どちらもリラクタンス トルクの寄与と動的制御帯域幅に影響します。
- スタック長 — 軸方向のパッケージング制約内でトルク密度目標を満たすように調整
カスタム積層形状のプロトタイプ ツールは、初期検証にワイヤ EDM またはレーザー切断を使用し、形状が確認された後に順送金型ツールを使用して、比較的低コストで製造できます。この 2 段階のアプローチにより、モーター設計者は、大量の工具への投資を時期尚早に行うことなく、積層ジオメトリを繰り返すことができます。
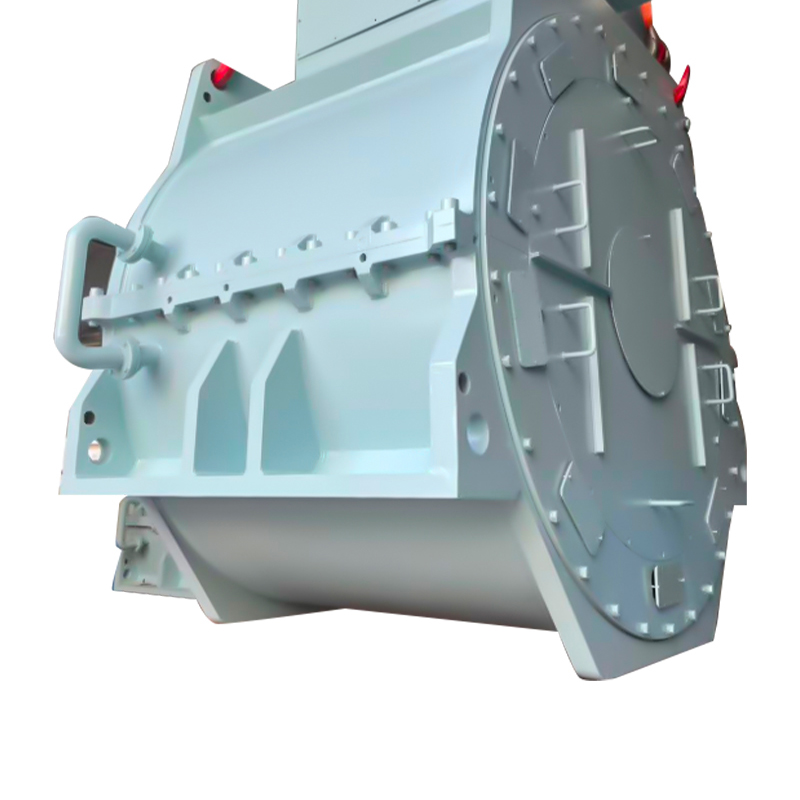
パフォーマンスの成果: 高品質コアがアプリケーションで提供するもの
の cumulative effect of material selection, dimensional precision, optimized pole–slot design, and careful assembly is measurable at the system level. Servo motors built on high-quality motor stator cores and precision-stamped laminations consistently demonstrate the following performance characteristics compared to motors using lower-specification cores:
- トルクリップルの低減 — ロボットジョイントや直線位置決めステージでのよりスムーズな動作プロファイルを可能にし、機械加工アプリケーションでの表面仕上げ品質とピックアンドプレイス自動化でのパス精度に直接的なメリットをもたらします。
- 動作温度の低下 — コア損失の減少により、定格負荷時の発熱が減少し、巻線の絶縁寿命が延長され、ディレーティングなしでより高い連続デューティサイクルが可能になります。
- より高速な動的応答 — 低い磁気損失と高い透磁率により、動作速度範囲全体にわたってモーターのトルク一定の安定性が向上し、サーボドライブのより狭い電流ループ帯域幅をサポートします。
- 振動と騒音の低減 — 制御された積層の平坦性、滑らかなスロットエッジ、および正確なローターバランスにより、可聴ノイズを発生させる機械的加振力が抑制されます。この要件は、医療、半導体、協働ロボット工学の用途でますます指定されています。
- 一貫したバッチ間のパフォーマンス — 生産実行全体にわたる厳密な寸法公差により、生産プログラムの存続期間全体にわたってモーター性能パラメータが仕様内に維持されることが保証され、システム統合段階での個別のモーター校正の必要性が軽減されます。
サーボ モーターが年間数千万回の位置決め動作を実行する可能性があるハイサイクルの製造環境では、これらの性能上の利点は、システムの動作寿命にわたってさらに増大します。つまり、低仕様のステーター ローター コア コンポーネントで構築されたモーターと比較して、エネルギー消費の削減、メンテナンス間隔の延長、総所有コストの改善が実現します。
あなたのメールアドレスは公開されません。 * が付いているフィールドは必須です






![]() Email: [email protected]
Email: [email protected]
[email protected]
[email protected]
![]() 電話/電話:
+86-18861576796 +86-18261588866
電話/電話:
+86-18861576796 +86-18261588866
+86-15061854509 +86-15305731515
