 jp
jp
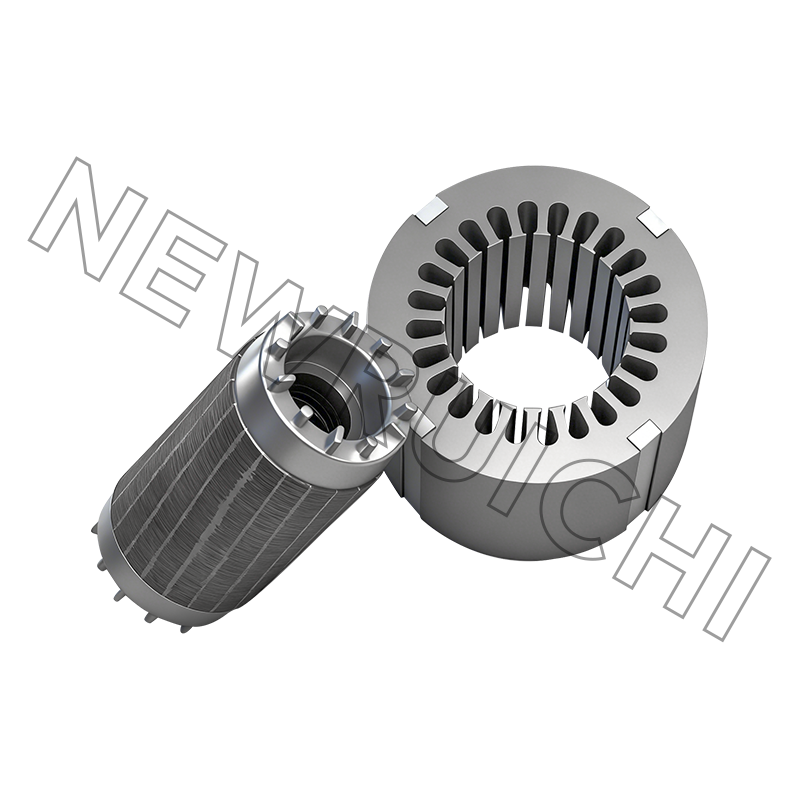
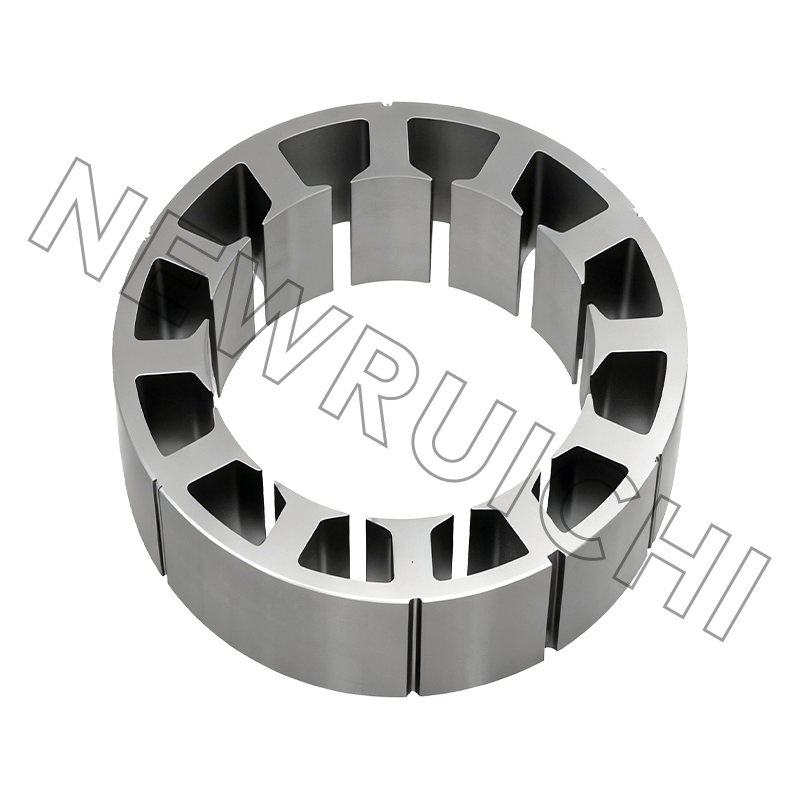
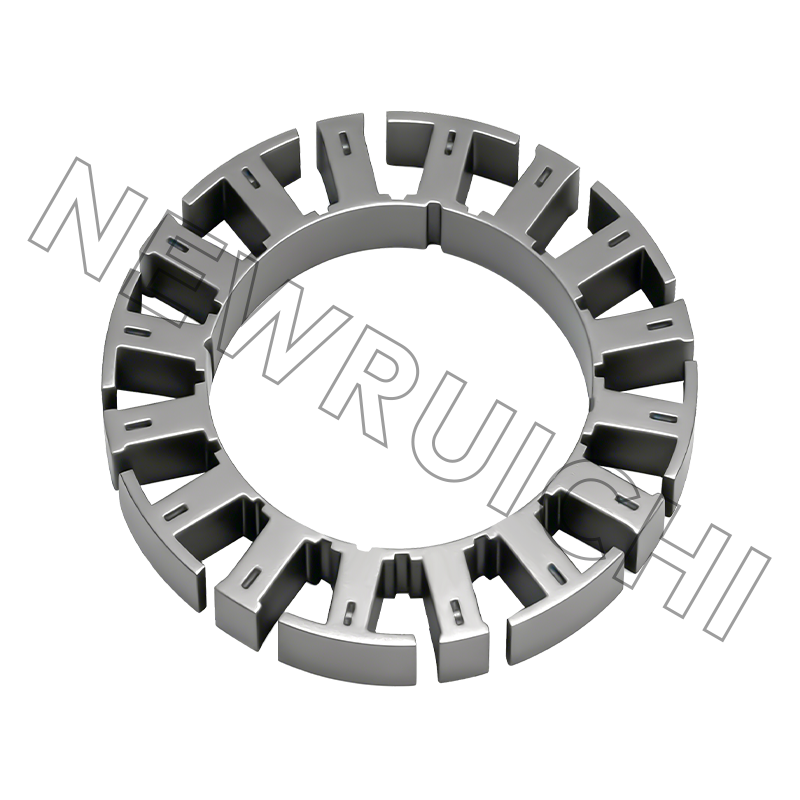
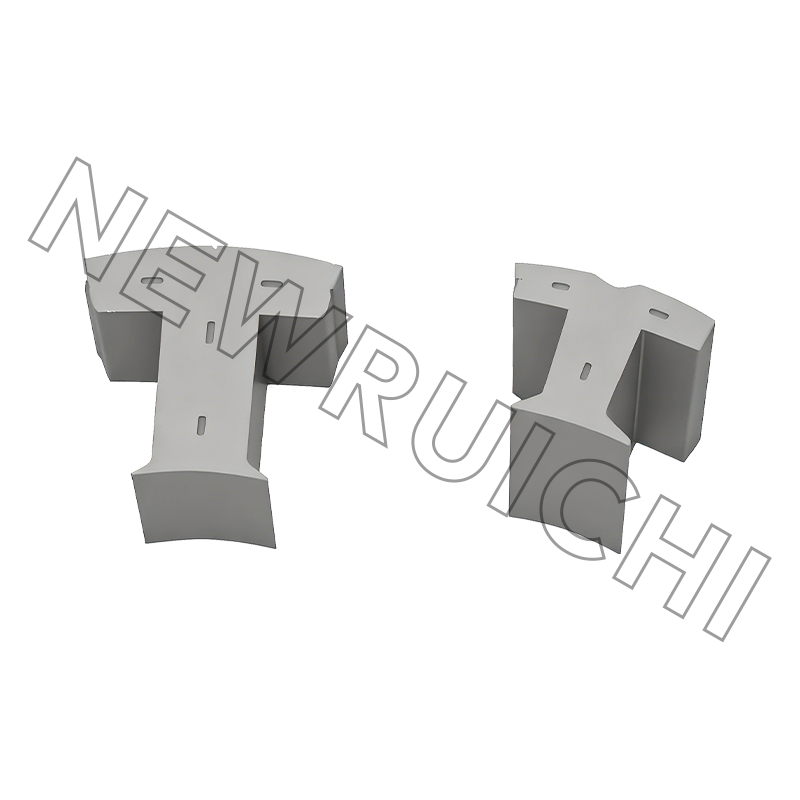
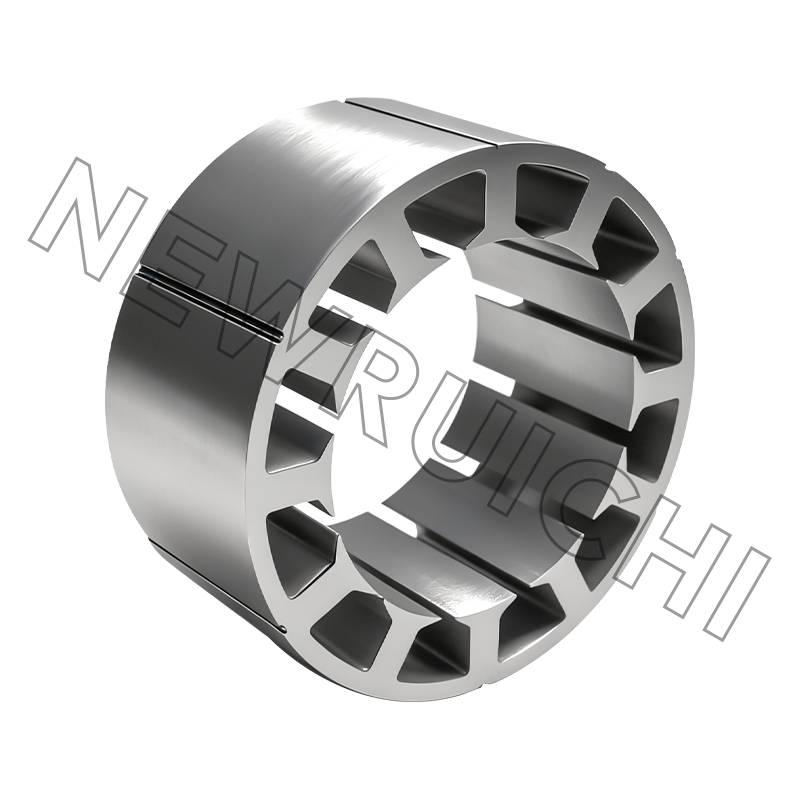
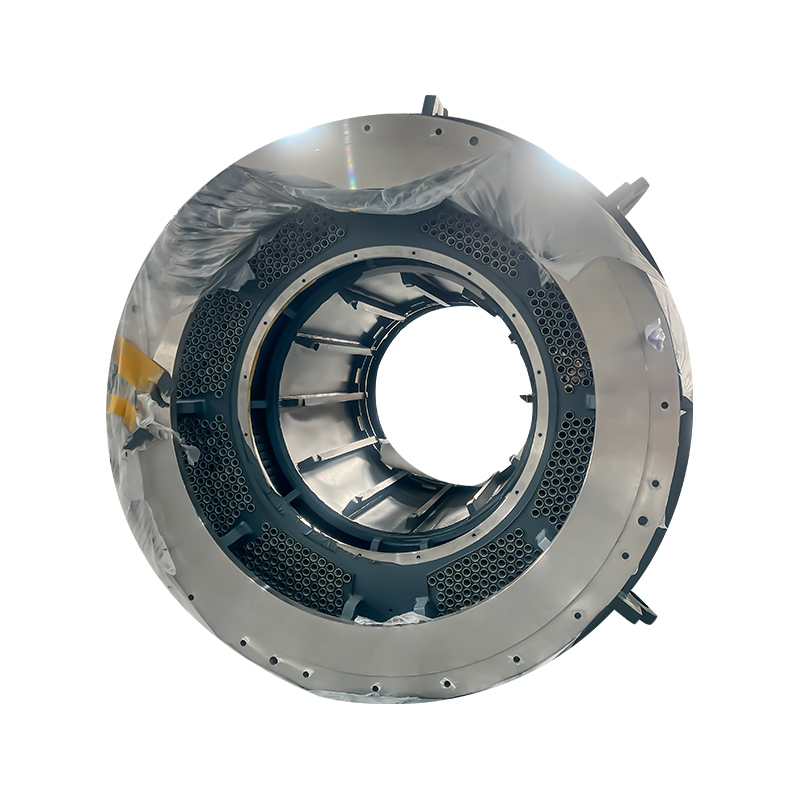
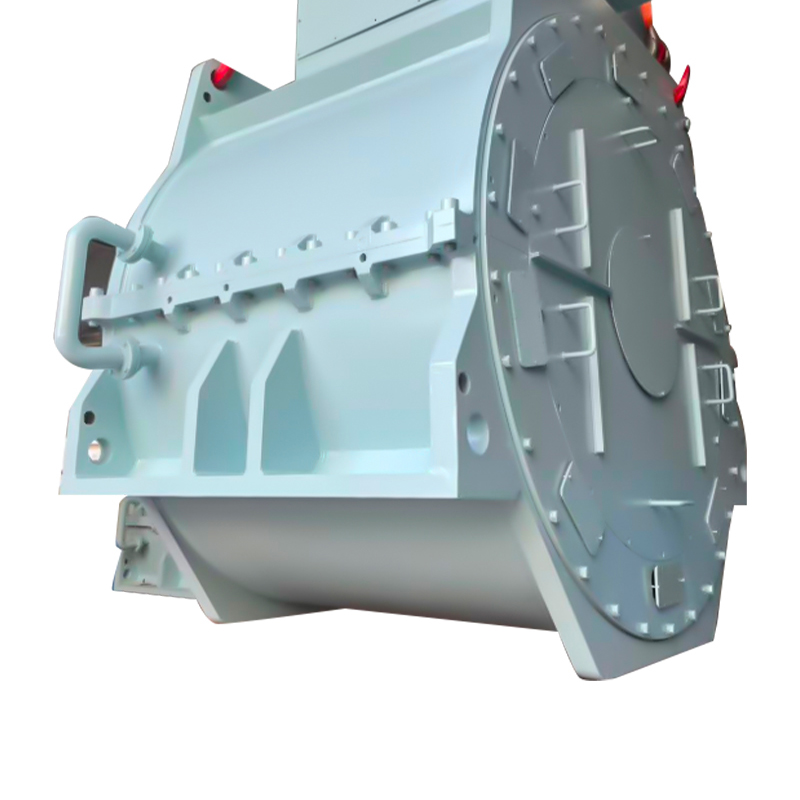
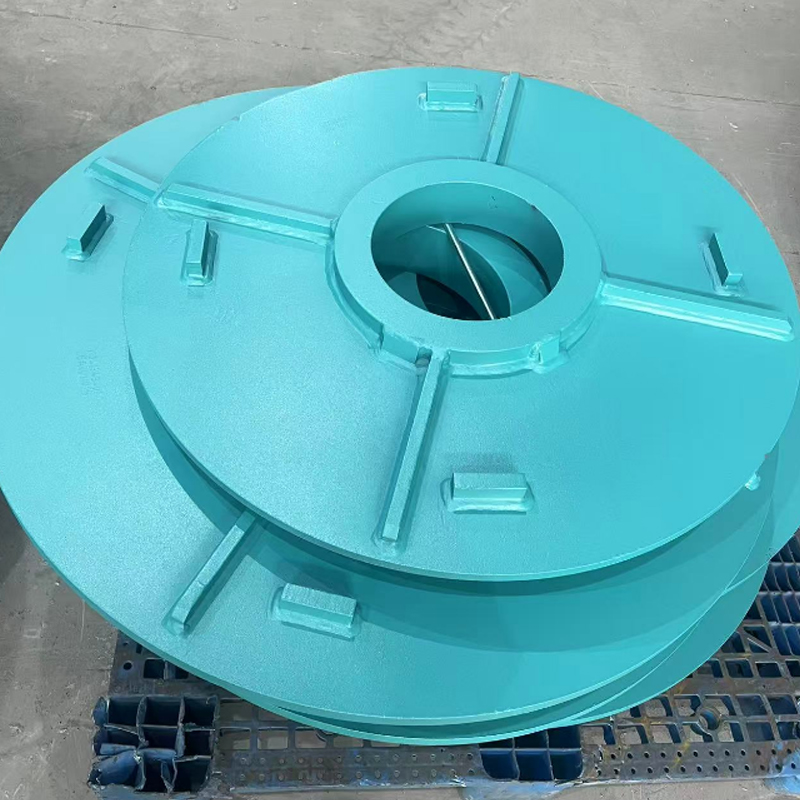
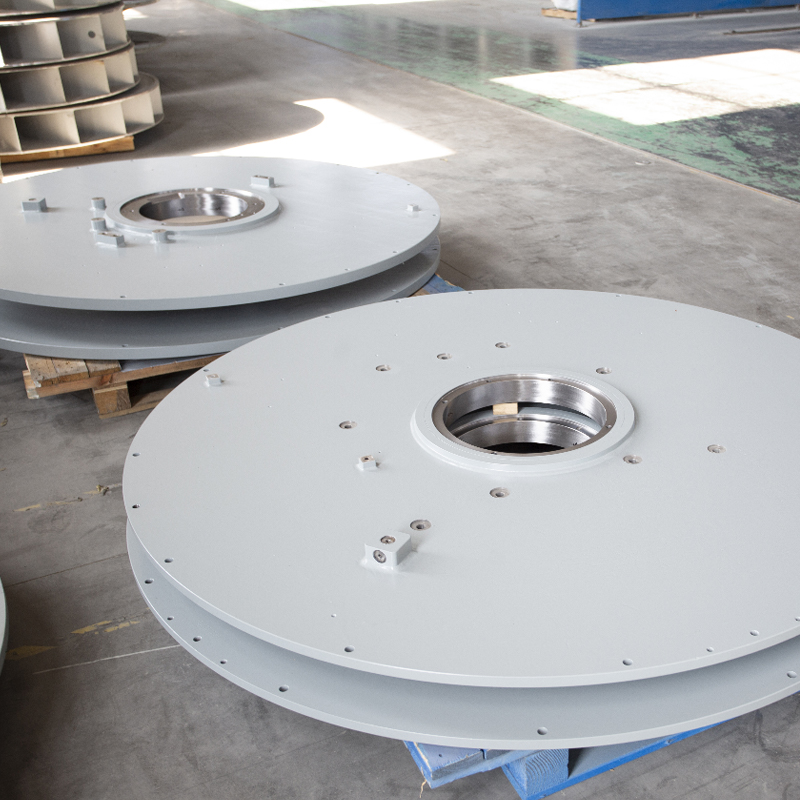
ステーモーターコアと電動モーターの積層構造の説明
ルイチの新商品






![]() Email: [email protected]
Email: [email protected]
[email protected]
[email protected]
![]() 電話/電話:
+86-18861576796 +86-18261588866
電話/電話:
+86-18861576796 +86-18261588866
+86-15061854509 +86-15305731515
